
-
 客服电话
客服电话
-
 APP下载
APP下载
迪恩网络APP
随时随地掌握行业动态

-
 官方微信
官方微信
扫描二维码
关注迪恩网络微信公众号
客服电话
APP下载
迪恩网络APP
随时随地掌握行业动态
官方微信
扫描二维码
关注迪恩网络微信公众号
开源软件名称:cupoch开源软件地址:https://gitee.com/zhenshenglee/cupoch开源软件介绍:
Robotics with GPU computing
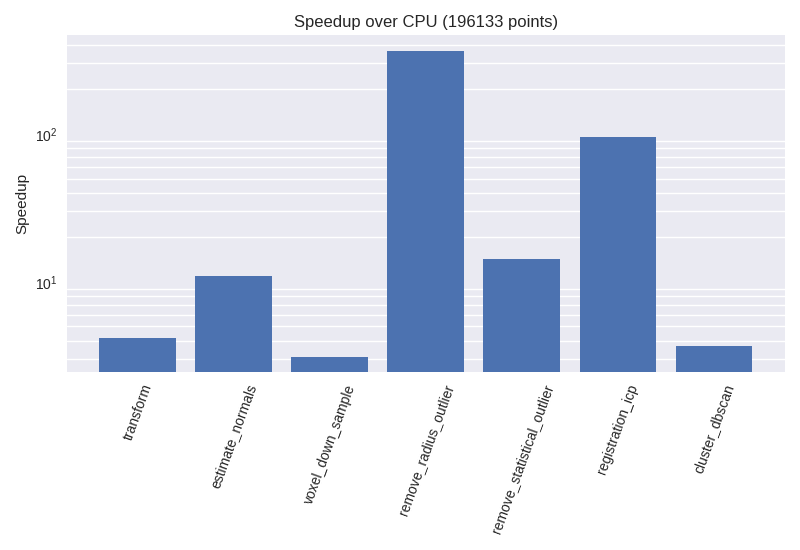
Cupoch is a library that implements rapid 3D data processing for robotics using CUDA. The goal of this library is to implement fast 3D data computation in robot systems.For example, it has applications in SLAM, collision avoidance, path planning and tracking.This repository is based on Open3D. Core Features
InstallationThis software is tested under 64 Bit Ubuntu Linux 18.04 and CUDA 10.1/10.2.You can install cupoch using pip. pip install cupochOr install cupoch from source. git clone https://github.com/neka-nat/cupoch.git --recursecd cupochmkdir buildcd buildcmake ..; make install-pip-package -jInstallation for Jetson NanoYou can also install cupoch using pip on Jetson Nano.Please set up Jetson using jetpack and install some packages with apt. sudo apt-get install libxinerama-dev libxcursor-dev libglu1-mesa-devpip3 install cupochOr you can compile it from source.Update your version of cmake if necessary. wget https://github.com/Kitware/CMake/releases/download/v3.16.3/cmake-3.16.3.tar.gztar zxvf cmake-3.16.3.tar.gzcd cmake-3.16.3./bootstrap -- -DCMAKE_USE_OPENSSL=OFFmake && sudo make installcd ..git clone https://github.com/neka-nat/cupoch.git --recursecd cupoch/mkdir buildcd build/export PATH=/usr/local/cuda/bin:$PATHcmake -DBUILD_GLEW=ON -DBUILD_GLFW=ON -DBUILD_PNG=ON -DBUILD_JSONCPP=ON ..sudo make install-pip-packageResultsThe figure shows Cupoch's point cloud algorithms speedup over Open3D.The environment tested on has the following specs:
You can get the result by running the example script in your environment. cd examples/python/basicpython benchmarks.py
Visual odometry with intel realsense D435
Occupancy grid with intel realsense D435
Kinect fusion with intel realsense D435
Stereo matching
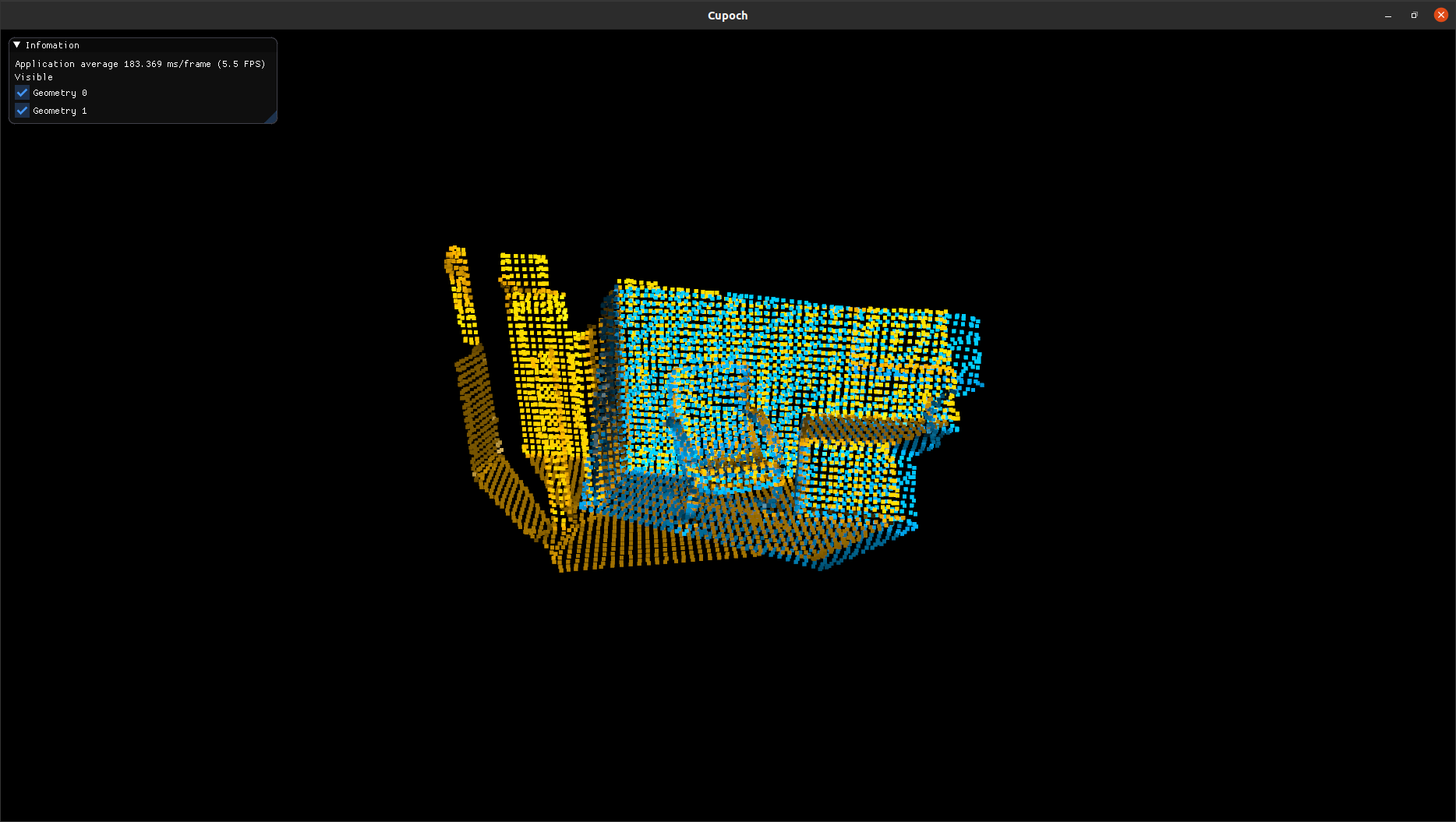
Fast Global Registration
Point cloud from laser scan
Collision detection for 2 voxel grids
Path finding
Visual odometry with ROS + D435This demo works in the following environment.
# Launch roscore and rviz in the other terminals.cd examples/python/rospython realsense_rgbd_odometry_node.py
Visualization
References
 |












请发表评论