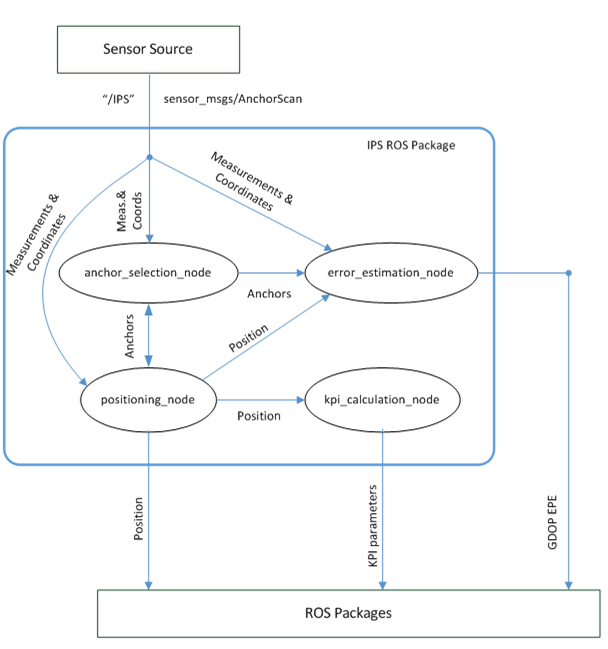
The objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS
package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of
the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor
algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks
and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the
calculation of KPI parameters.
Maintenance for the package will be supported by Inovasyon Muhendislik Ltd.

 客服电话
客服电话
 APP下载
APP下载

 官方微信
官方微信















请发表评论